Maison
Maison




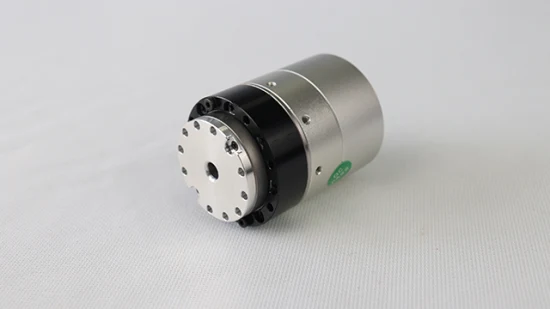
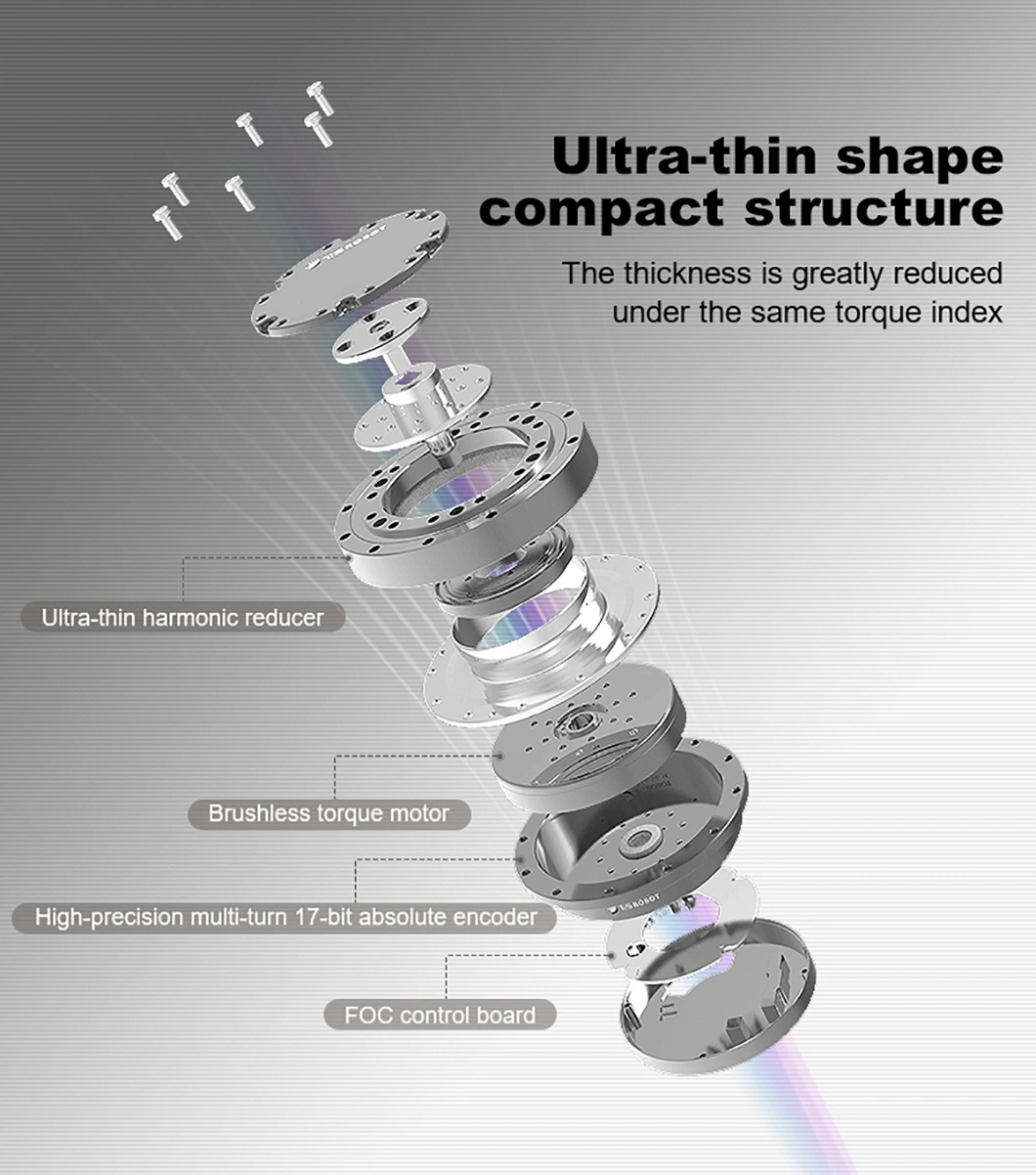
Moteur servo sans cadre dans les articulations du bras du robot
Présentation du servomoteur Moteur sans cadre dans les articulations du bras du robot Description du produit Le diamètre
Overview
Informations de base.
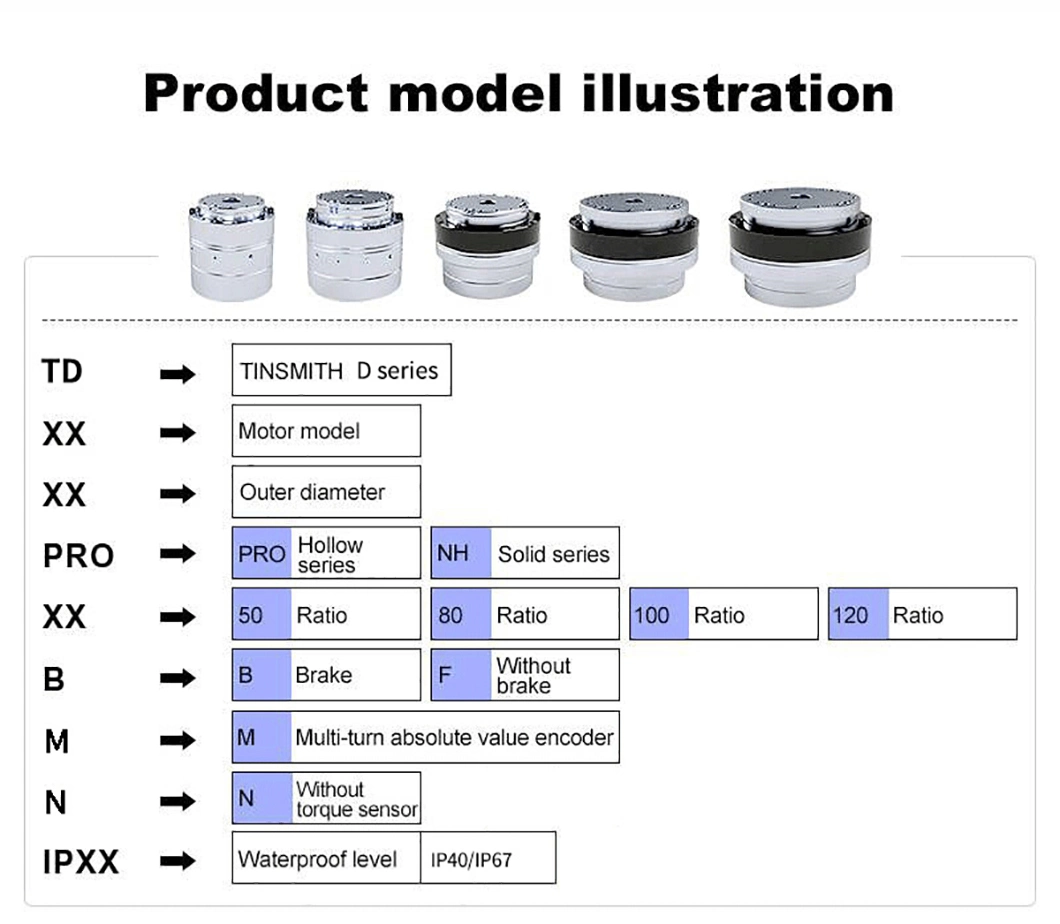
| Numéro de modèle. | TD-40-52 |
| Structure et principe de fonctionnement | Sans balais |
| Taper | Bras de robot mécanique |
| Attestation | CE |
| Marque | Ferblantier |
| Courant nominal | 1A |
| Courant de pointe | 3A |
| Tension d'alimentation | 24-48V |
| Puissance du moteur | 36W |
| Longueur | 53,9 mm |
| Poids | 0,13kg |
| Bus de communication | Peut |
| Résolution de l'encodeur | 17 bits |
| Couple nominal | 2,3/3,3 nM |
| Couple maximum instantané | 6,6/9n.M |
| Vitesse nominale | 90/45 tr/min |
| Vitesse de pointe de sortie | 120/60 tr/min |
| Rapport | 50/100 |
| Couple de pointe démarrage-arrêt | 3,3/4,8 nM |
| Article | Moteur servo sans cadre dans les articulations du bras du robot |
| Forfait Transport | Carton |
| spécification | 225*208*118mm |